

Stemming from Greek mythology, Argus was a shepherd with one hundred eyes. It was said that at any given time, at least one eye was always awake.
The purpose of the Argus 682 Project was to design a wireless sensor platform capable of capturing automobile-oriented sensor data and transmitting it wirelessly to a base station for monitoring.
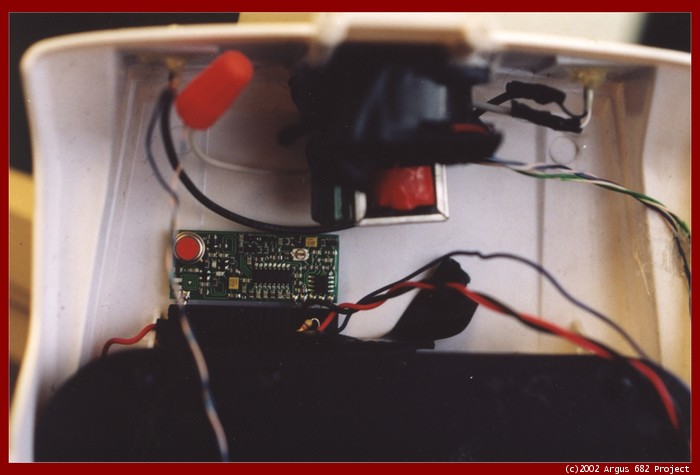
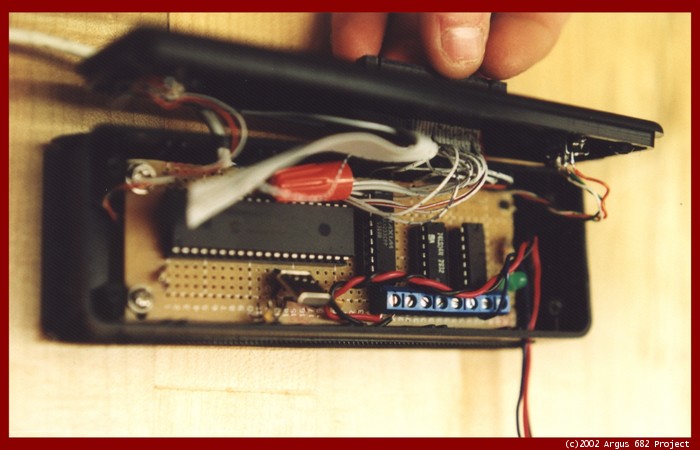
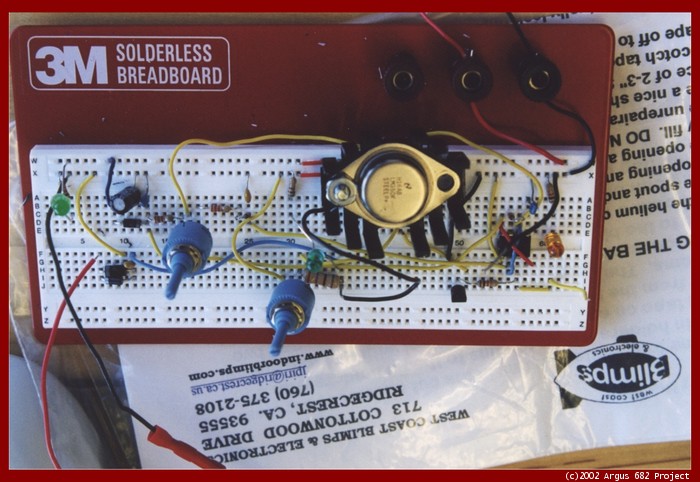
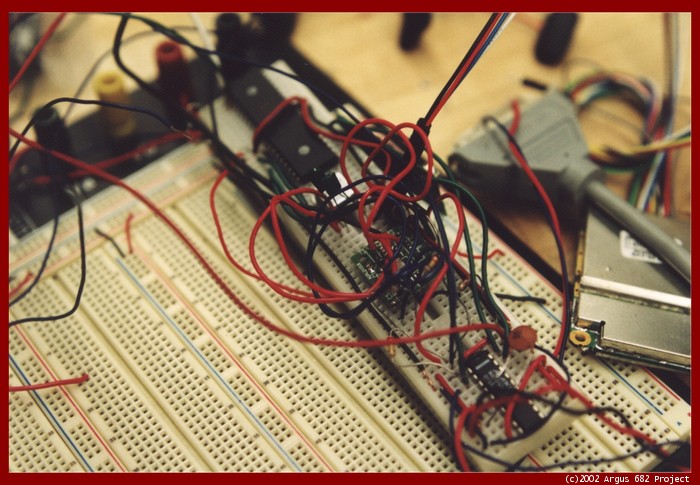
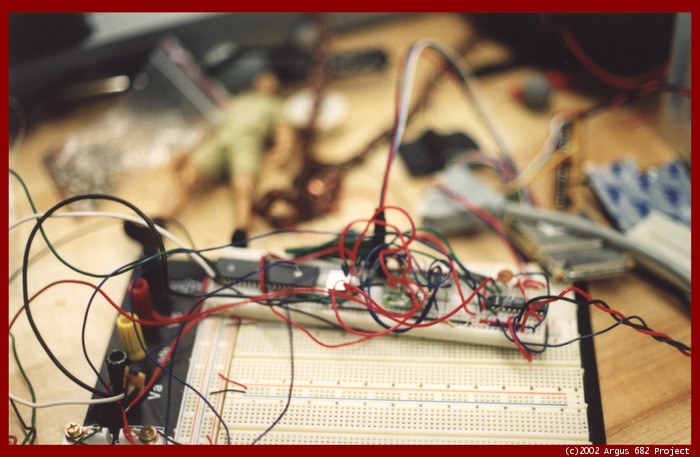
Several iterations of software and hardware engineering were required to render a complete system as our design evolved over a period of 10 weeks.
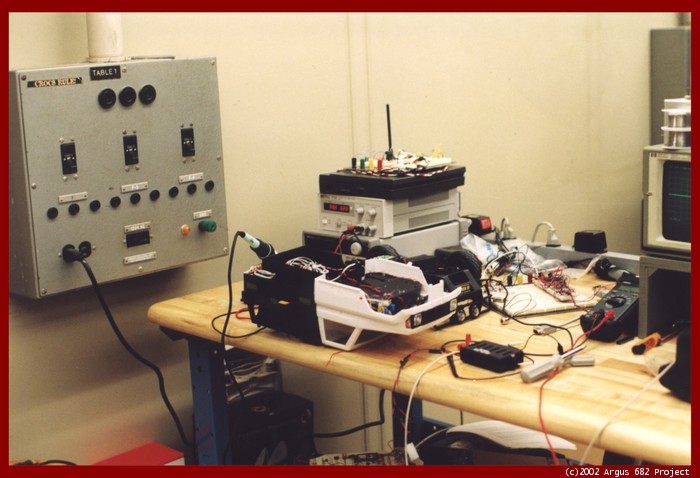
It looked like this.
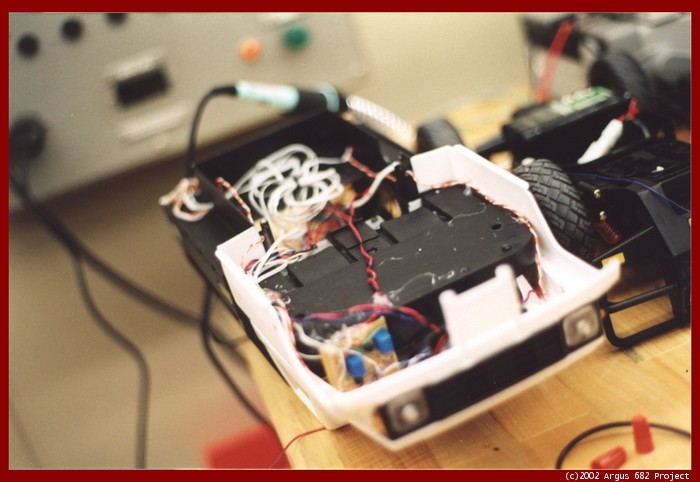
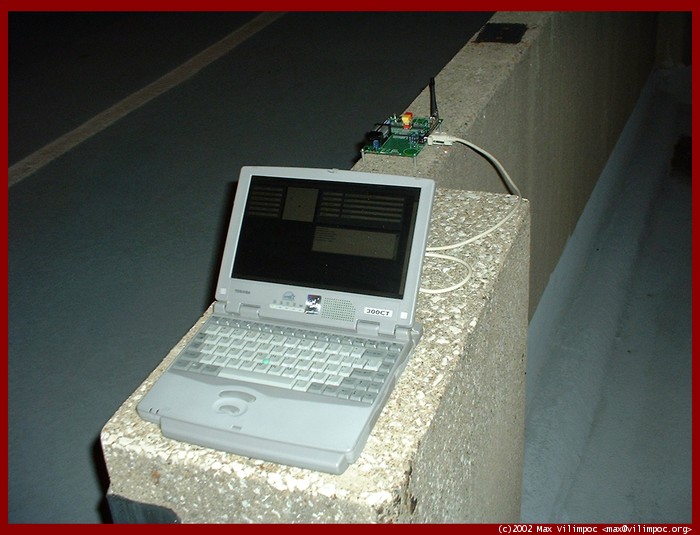
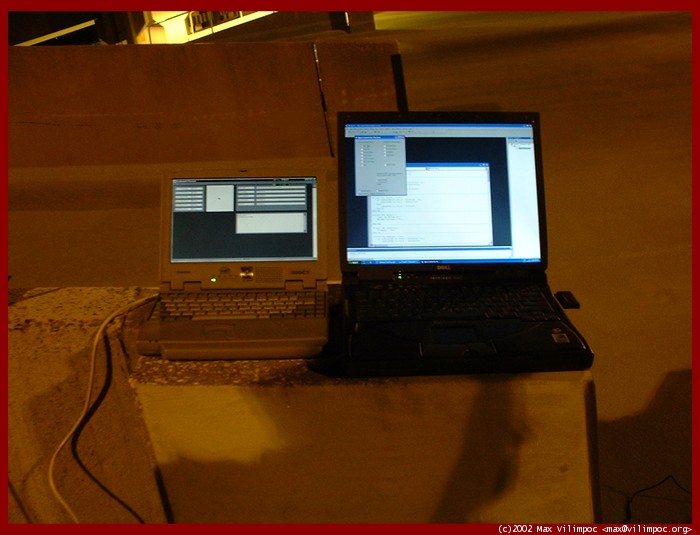
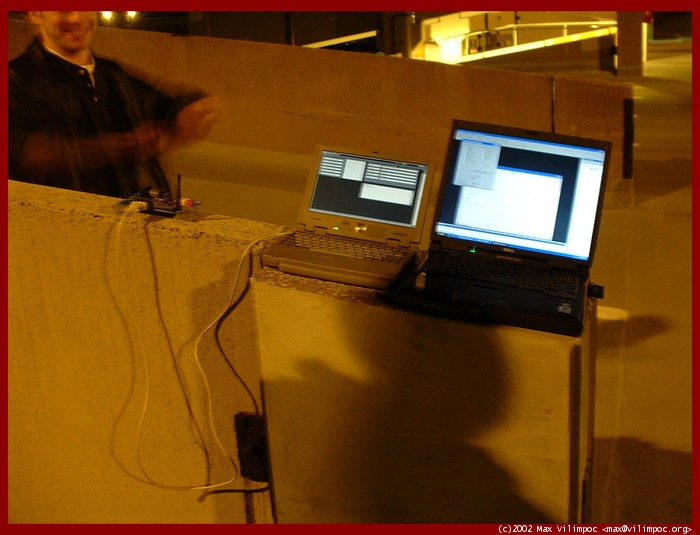
The result of our work is captured here.
| Nate Distel | GPS, Physical Integration |
| Richard Fouts | Power Management |
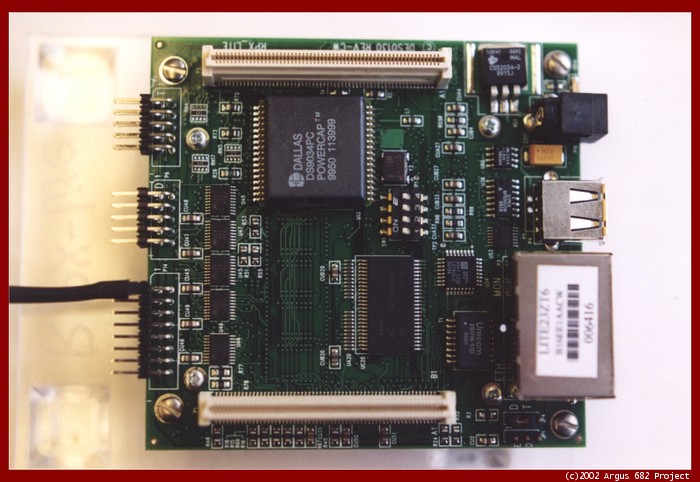
| Solomon Gibbs | Single Board Computer, GUI Development |
| Aravind Mikkilineni | Single Board Computer, Microcontroller Development |
| Patrick Stemen | MCU, Command / Control |
| Max Vilimpoc | Microcontroller Dev, Embedded Serial Sensor Daemon, GUI |
| Michael Volkerding | Wiring, Logistics |
Embedded Serial Sensor Daemon, using Hi-Tech's C Compiler for Microchip PIC
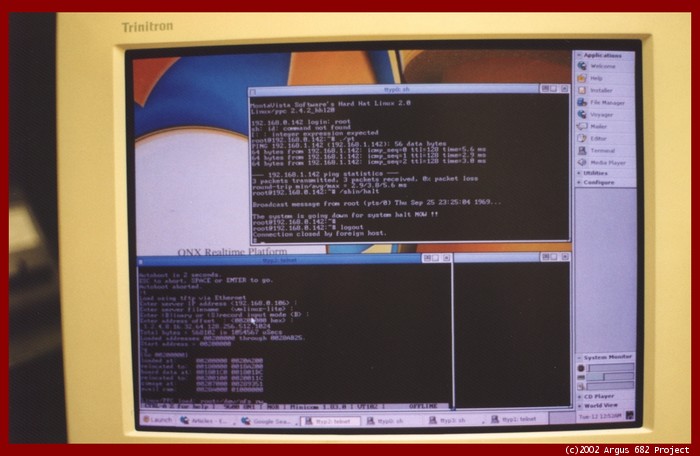
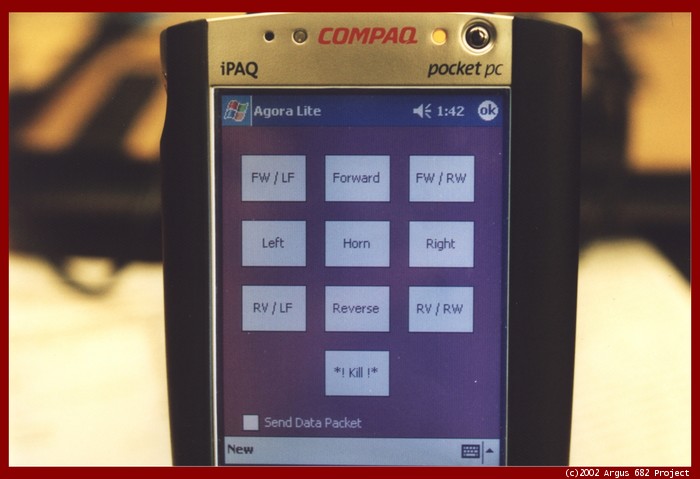
CrossBow was the interface software built by Max Vilimpoc to interpret the data from the sensor module.
Data packets were polled across the wireless serial interface, and interpreted piece by piece as specified in the packet format.
wxWindows is a cross-platform user interface library written in C++ which is easy to learn and customize as needed.
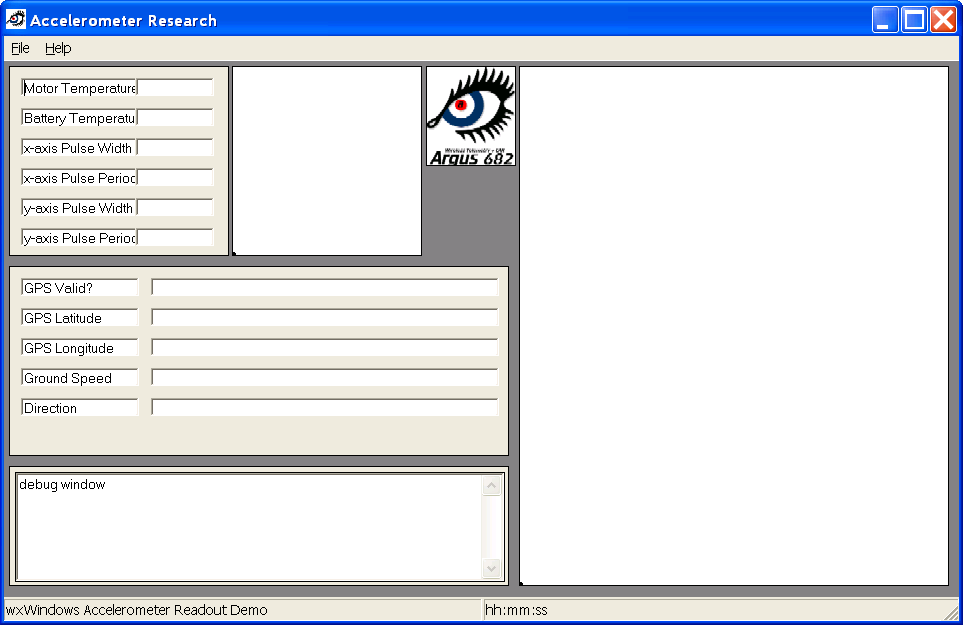
One of the handy tricks we used to save on compilation time involved the use of a program called serproxy, which takes care of the dirty work needed to poll a PC serial port. It reroutes serial port output to a TCP/IP socket, which CrossBow then connected to with simpler polling routines.

| EE582 Final Report | [pdf] |
| EE682 Interim Report | [pdf] [doc] |
Click here to view our midterm presentation slides (February 05, 2002). Also in [ppt] and [pdf].
Click here to view the slides we created for our final presentation (March 13, 2002).














Last updated: July 22, 2003 ➡️ 1 April 2023 (mobile friendly)