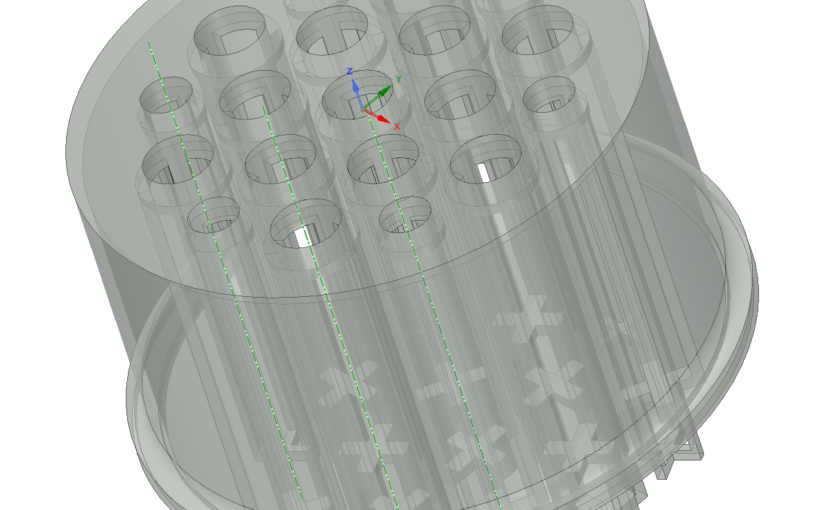
The long-form post is finally done, walking through everything I needed to do when modeling and printing a small hydroponic support structure. I won’t repeat myself here.
Links:
The long-form post is finally done, walking through everything I needed to do when modeling and printing a small hydroponic support structure. I won’t repeat myself here.
Links:
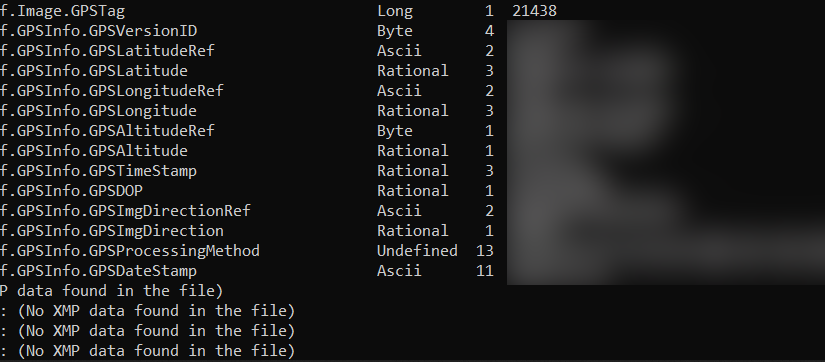
It never ceases to amaze me how information-leaky our smartphone cameras are.
Even after editing pictures, it’s a good idea to strip metadata from uploaded images, especially if they show where you live down to a city block.
Maybe GPS tags should be opt-in rather than opt-out.
Continue reading Strip Your Geotags, People!A couple of weeks ago, I started working on another of my infinite small projects.
This time, I needed a tool that could show me what was going on with another piece of firmware I was working on that was transmitting data regularly in the unlicensed 2.4 GHz frequency band.
The problem is this: I have multiple transmitters using the same frequency to send data to a single receiver. When the data rate starts to creep upward and the interval between transmissions decreases, you start getting serious resource contention.
It’s a classic multi-user situation, which is solved in other wired and wireless standards using things like Carrier Sense Multiple Access / Collision Detection (CSMA/CD). (In Ethernet or Wi-Fi, example.)
I don’t have access to the specialized off-the-shelf tooling needed to monitor the radio spectrum (it’s pretty expensive). So I decided to build my own, very limited, very specific tool.
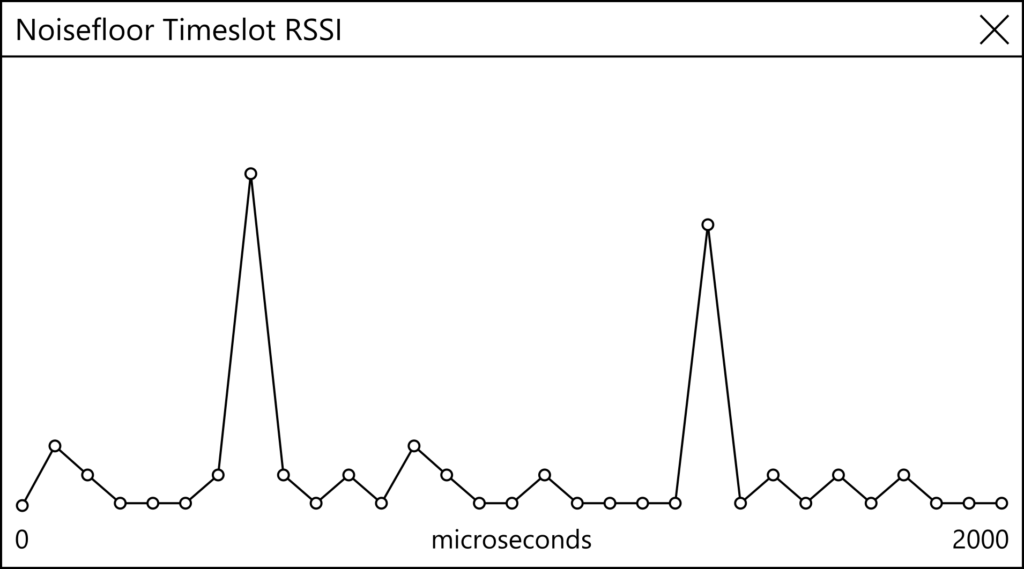
That tool is Noisefloor, a small tool to help me visualize and debug a Time Division Multiple Access multiplex scheme by sampling the TDMA timeslot and plotting out when the various nodes are transmitting.
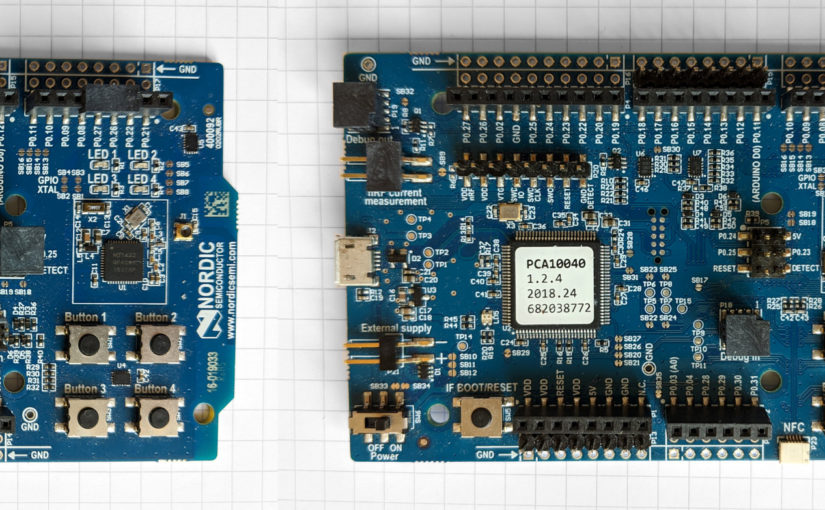
It runs on Nordic Semiconductor nRF5 Series chips using a single firmware executable.
Specifically: the nRF51422, nRF52832, and nRF52840.
That’s right, there’s a single binary file to load, compiled to the ARM v6-M specification, that runs on the off-the-shelf nRF51-DK, nRF52-DK, and nRF52840 Dongle development boards.
Part of the fun of developing this firmware was figuring out how to do write-once, run-anywhere code that dynamically adapts to the underlying microcontroller.
Anyways, thus far, I’ve pushed three posts out on the topic, and am documenting it as I go, including Requirements and Architecture specs. The code is almost feature-complete, and I’ll be slowly writing that up, too.
For more info, please check out the project. Any feedback or questions would be welcome.
For anyone looking for a 6 month at-a-glance calendar you can print on two A4 sheets (double-sided), this is my favorite layout.
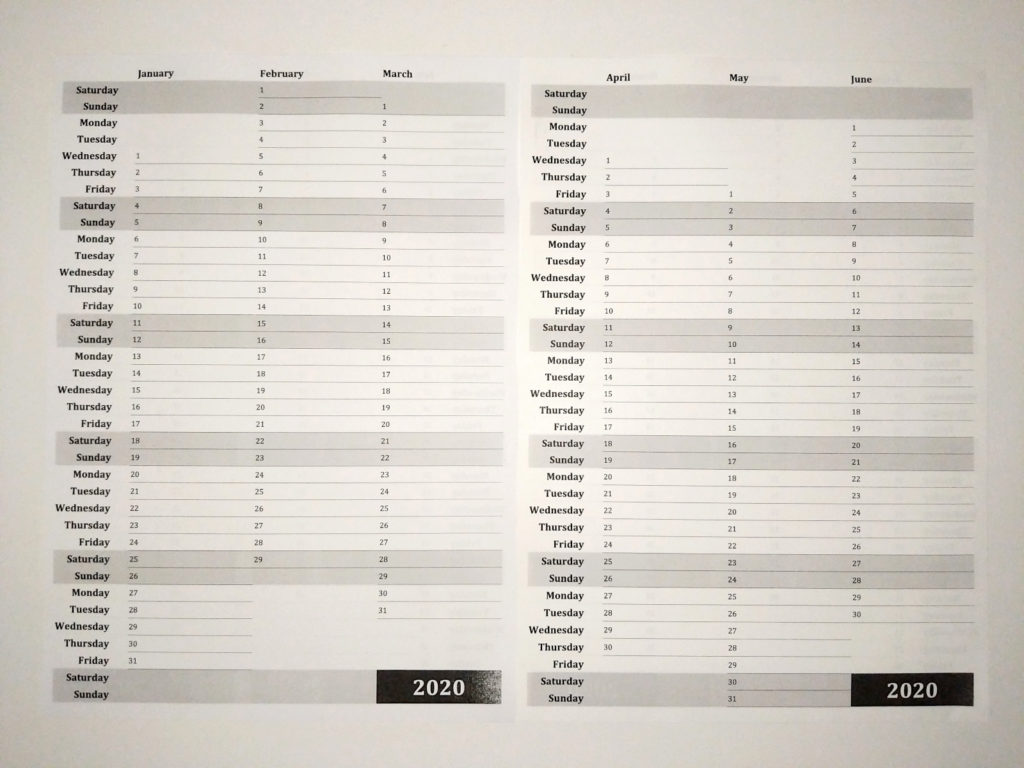
Here’s the PDF file.
Print pages 1, 3 and 2, 4 back-to-back on the same piece of paper, and you can always see 6 months at a time by flipping and placing the sheets next to each other.
File this one away under dubious uses for a 3D printer.
Continue reading Floppy Green Onions